AC and DC motors are simple motor classifications that are useful for various industries and applications. Both carry the primary function of converting electrical energy to mechanical energy but through different processes.
AC motors operate by the passage of current in which the flow direction reverses occasionally, as the name ‘Alternating Current.’ They are suitable for varied uses where operation reliability and efficiency are always necessary. Such applications include home appliances, manufacturing tools, and climate control devices.
On the other hand, DC motors operate on direct currents where the electric current flows in a single direction only. They are suitable for applications where regulation is critical with a relatively high precision speed and where there is a need for an ample starting torque. Applications include automotive systems, robotics, and other home-use appliances.
Overview of AC Motors
AC motors are widely valuable for industrial and commercial applications due to their efficiency, durability, and ease of operation.
Parts of AC Motors
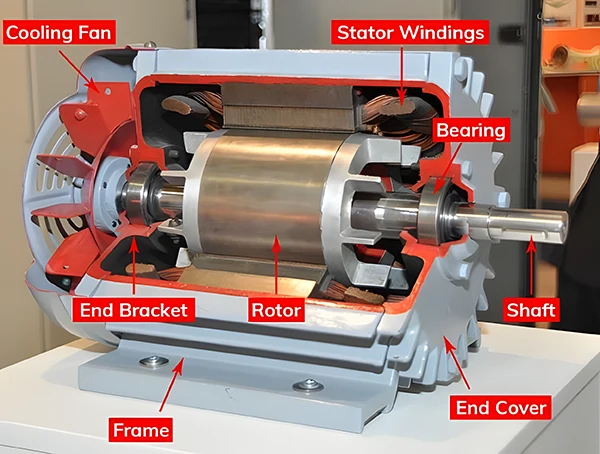
| Part | Function |
|---|---|
| Stator | The stationary part that produces the magnetic field is composed of laminated steel sheets with windings of insulated wire. |
| Rotor | The rotating part that turns the mechanical load can be either a squirrel cage or wound type. |
| Shaft | Transfers mechanical energy from the motor to the driven load; extends out of the motor housing. |
| Bearings | Support the rotor and allow it to rotate smoothly within the stator; it can be ball or roller bearings. |
| End Bells | The covers on each end of the motor house the bearings and provide structural support; they include cast iron or aluminum. |
| Fan | It cools the motor by forcing air over its surface to dissipate heat, often mounted on the rotor shaft. |
| Enclosure | It protects internal components from external contaminants and physical damage and varies from open frames to fully enclosed designs. |
Types of AC Motors and Their Functions
Synchronous Motors
Synchronous motors maintain a constant speed, which is proportional to the frequency of the AC voltage supply. They are suitable where precise speed regulation is critical. This characteristic ensures that the speed of the motor is stable; it can change its speed depending on the load it gets. It is essential, especially in systems that need touch control and synchronization.
Therefore, synchronous motors are helpful in large industrial applications where consistent operation is necessary, as well as in power factor correction and synchronizing generator applications.
These motors are unique because they can operate at a synchronous speed equal to the power frequency. However, synchronous motors require an external excitation to the rotor to generate the magnetic field, which differentiates them from other motor types. This external excitation is necessary to produce the magnetic field and maintain a synchronous operation.

Asynchronous (Induction) Motors
Asynchronous motors operate through the principle of electromagnetic induction. In an induction motor, the rotor rotates with an angular velocity slightly less than the synchronous speed. The slip is the difference between the rotor speed and the synchronous speed. This slip is essential for creating a current in the rotor and, thereby, the torque.
Single-phase induction motors are commonly used in home appliances and small machines due to their simplicity, reliability, and cost-effectiveness. These motors typically start running with the help of other starting devices like split-phase, capacitor start, or shaded-pole to initiate rotation from single-phase power. It is helpful for fans, pumps, and other household appliances such as refrigerators. They are easy to construct and relatively cheap, making them suitable for general use.

On the other hand, three-phase induction motors are applicable in power tools, machinery, and other industrial applications that require more energy and performance. These motors feature mechanical design improvements for high reliability and allow for constant operation. This makes them usable in conveyors, industrial pumps and compressors, fans and blowers, etc.
They are better for their superiority over single-phase motors in output and power factor, and they are self-starting. However, they require connecting to a three-phase power source, which is essential for the proper and efficient operation of the motors.
Overview of DC Motors
DC motors operate using direct current (DC) as their power source. They are widely applicable in various applications due to their simplicity, control, and efficiency.
Critical Parts of DC Motors
| Part | Function |
|---|---|
| Stator | The stationary part of the motor provides the magnetic field. It usually contains field windings or permanent magnets. |
| Rotor | The motor’s rotating part is on the output shaft. It carries the windings that interact with the magnetic field to create motion. |
| Commutator | The commutator is a rotating switch that alters the direction of current in the rotor windings. As a result, the motor is able to maintain continuous rotation. It includes split rings that maintain electrical contact with the rotor via brushes. |
| Brushes | Conductive materials (typically made from carbon or graphite) that provide electrical contact between the stationary and rotating parts of the motor. They press against the commutator to deliver current to the rotor windings. |
| End Bells | Covers that protect the ends of the motor and house the bearings and brushes. They also support the rotor and commutator assembly. |
| Bearings | The bearings provide support for the rotor, enabling it to rotate smoothly inside the motor housing. |
| Field Windings (for wound-field motors) | When current passes through them, coils of wire on the stator generate the magnetic field. Permanent magnets replace permanent magnet DC motors. |
Types of DC Motors
Brushed DC Motors
Brushed DC motors are present in two forms. Series wound DC motors are those where the connections of the armature and the field windings connect in series and thus have high starting torque. These motors suit industries and businesses requiring a variable speed and a high torque load.
Shunt-wound DC motors are brushed-DC motors comprising field windings parallel to the armature. This arrangement ensures that the load does not influence the motor speed. This characteristic makes them suitable for applications where accurate speed control is desirable.
Compound wound DC motors have series as well as shunt windings. These motors are a combination of high starting torque and stable motor speed. For this reason, compound wound motors are helpful and suitable where loads fluctuate.
Brushless DC Motors (BLDC)
BLDC motors can be categorized into two types, depending on the rotor’s position relative to the stator. In the outer rotor type, the rotor surrounds the stator windings, providing more rotational inertia and making it ideal for applications requiring smooth and stable motion. This configuration is helpful in many appliances and machines, especially where high efficiency and reliability are necessary, like computer hard drives and cooling fans.
On the other hand, the inner rotor type is an electrical machine in which the rotor is in the stator windings. This design is highly beneficial in applications that require miniature form factor and high power density and is thus applicable to robotics and aerospace fields. Hence, both types of BLDC motors have more performance and efficiency benefits over their different applications BLDC motors.
Efficiency and Performance Metrics: AC Motors vs. DC Motors
Energy Efficiency
Some parameters that affect the efficiency of AC and DC motors include power factor and slip. For induction motors, the efficiency η is:
η=Pout/Pin ×100
Where Pout =output power and Pin =input power. The input power consists of the electrical input power to the motor and the losses, including core loss, copper loss, and mechanical loss, such as friction loss. Another factor that impacts efficiency for synchronous motors includes the power factor, and the value must be unity to achieve maximum efficiency.
Speed Control
Speed control in AC motors depends on varying the supply frequency (in synchronous motors) or using variable frequency drives (VFDs). The speed 𝑁 of an induction motor is calculated using the formula:
N=120f/P
where 𝑓 represents the supply frequency in Hertz and P is the number of poles.
Speed control in DC motors is relatively straightforward and depends on varying the armature voltage V. The speed N of a DC motor can be determined by the equation:
N=(V-IaRa)/(keφ)
V is the applied voltage, Ia is the armature current, Ra is the armature resistance, (ke) is the back electromotive force (EMF) constant, and Φ is the flux per pole.
Torque Generation
Torque in an AC motor, particularly in induction motors, is given by:
T=Pout/w
Where T and ω are the angular velocity in radians per second.
The torque T in a DC motor is given by:
T=ktIaφ
kt is the torque constant, φ is the flux, and Ia is the armature current. DC motors provide high starting torque and can be controlled easily for variable speed and torque applications.
Load-Handling Capabilities
AC motors, especially induction motors, suit varying load conditions and are vital for continuous duty. Their performance is laden with changes in the loads where the efficiency is usually lower under light-load and high-load conditions. The load factor is also crucial for the long-term operating outcome and utilization of resources.
DC motors are suitable for applications where a system frequently starts, stops, or reverses its direction. The load-handling capacity is the amount of torque at low levels of revolutions per minute. The performance of a DC motor under load can increase with electronic control circuits that control the voltage and current.
Advantages and Disadvantages of AC Motors
| Aspect | Advantage | Disadvantage |
|---|---|---|
| Cost | Generally, the initial cost is lower than DC motors due to more straightforward construction and fewer components. | The need for additional equipment, such as variable-frequency drives (VFDs) for speed control, may result in higher installation and operational costs. |
| Efficiency | High efficiency in converting electrical power to mechanical power, especially in large-scale applications. | Efficiency can be affected by power factor issues; maintaining a high power factor may require additional components. |
| Maintenance | The lack of brushes and commutators minimizes maintenance requirements. | Effective cooling and ventilation are crucial to avoid overheating, and routine maintenance of the bearings and insulation may still be necessary. |
| Speed Control | Speed control involves VFDs, which allow for precise and flexible speed adjustments. | The complexity and cost of VFDs can be a drawback for applications requiring simple or low-cost solutions. |
| Durability | Robust and durable design, particularly in industrial applications with high operational demands. | Sensitivity to environmental conditions such as humidity and dust can affect performance and longevity. |
| Operational Stability | Provides stable and continuous operation with consistent performance in varying load conditions. | They may experience efficiency losses at low or high loads, impacting overall performance in specific applications. |
| Power Facto | AC motors can have a good power factor with proper design and control, improving overall system efficiency. | Power factor correction may be needed to optimize efficiency and reduce reactive power losses, leading to additional costs. |
| Size and Weight | Generally lighter and more compact than equivalent DC motors for the same power rating. | In some cases, AC motors may require additional components for optimal performance, increasing overall size and weight. |
| Applications | Versatile and widely used in various applications, including HVAC systems, industrial machinery, and household appliances. | It is only as suitable for applications requiring high starting torque or precise speed control with additional equipment. |
Advantages and Disadvantages of DC Motors
| Aspect | Advantage | Disadvantage |
|---|---|---|
| Cost | Typically, smaller motors and applications cost less due to simpler control systems. | Higher initial costs for larger motors and the need for additional components like commutators and brushes can increase maintenance costs. |
| Efficiency | Generally high efficiency with precise control over speed and torque. | Efficiency reduces losses from brushes and commutators and, in some cases, increases energy consumption. |
| Maintenance | Due to their simple design and control systems, they are straightforward to maintain and repair. | Brushes and commutators wear out over time, requiring regular maintenance and replacement. |
| Speed Control | It offers accurate speed regulation and flexible torque adjustment, making it perfect for applications that demand precise modifications. | Speed control systems can be more complex and costly than AC motors, particularly in high-power applications. |
| Durability | Robust and reliable, especially in applications where precise control and high starting torque are needed. | It depends on the wear and tear of brushes and commutators, affecting durability and performance over time. |
| Operational Stability | Due to superior control capabilities, excellent performance in variable load conditions, and frequent starts/stops. | If not correctly maintained, performance can be less stable under extreme or high temperatures. |
| Power Facto | It typically has a good power factor in many applications, but it is less of a concern than AC motors. | Power factor issues are generally less pronounced but can affect efficiency in specific configurations. |
| Size and Weight | They are compact and lightweight for their power, making them suitable for space-constrained applications. | Larger DC motors may require additional space for brush and commutator assemblies, potentially impacting overall size and weight. |
| Applications | It is ideal for applications requiring high starting torque, precise control, and frequent reversals, such as robotics and automotive systems. | Due to heat dissipation and brush wear limitations, DC motors are less suitable for high-power, continuous-operation applications than AC motors. |
Take Home
The decisions to use AC or DC motors are thus more guided by the nature of the application. AC motors are better due to their robustness, energy-saving, and affordability, especially in business institutions. These and similar characteristics can be essential in various applications with very little maintenance and simple designs, ranging from home to industrial use.
On the other hand, DC motors are ideal for use where variable speeds, high starting torque, and reversing action are necessary. One of its specific applications is flexibility and ease of control, an excellent feature for automobile systems, robotics, and numerous microdevices.
On the other hand, higher maintenance requirements and efficiency losses associated with brushes and commutators may be disadvantageous in specific applications. In conclusion, knowledge and analysis of the strengths and weaknesses of each motor type enables one to make a decision based on performance expectations, cost, and operational aspects. Understanding what is necessary in a particular application is essential in motor applications.