I motori CA e CC sono semplici classificazioni di motori utili per vari settori e applicazioni. Entrambi svolgono la funzione primaria di convertire l'energia elettrica in energia meccanica, ma attraverso processi diversi.
I motori a corrente alternata funzionano grazie al passaggio di corrente in cui la direzione del flusso si inverte occasionalmente, da cui il nome "corrente alternata". Sono adatti a diversi utilizzi in cui sono sempre necessarie affidabilità ed efficienza di funzionamento. Tali applicazioni includono elettrodomestici, strumenti di produzione e dispositivi di controllo del clima.
I motori a corrente continua, invece, funzionano a corrente continua, dove la corrente elettrica scorre in una sola direzione. Sono adatti per applicazioni in cui la regolazione è fondamentale, con una velocità di precisione relativamente elevata e con la necessità di un'ampia coppia di spunto. Le applicazioni comprendono i sistemi automobilistici, la robotica e altri elettrodomestici.
Panoramica dei motori in c.a.
I motori a corrente alternata sono ampiamente utilizzati nelle applicazioni industriali e commerciali grazie alla loro efficienza, durata e facilità di funzionamento.
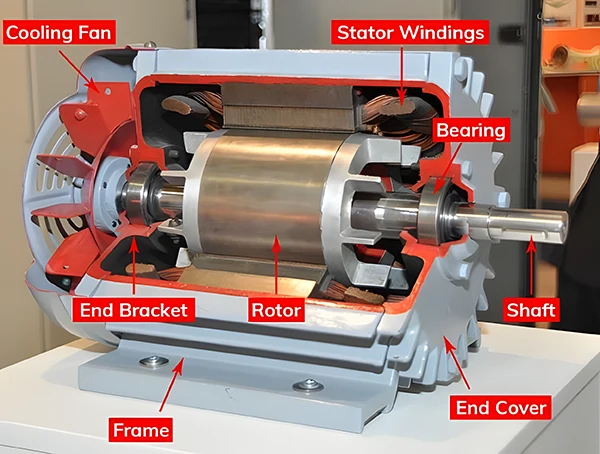
Parti dei motori CA
| Parte | Funzione |
|---|---|
| Statore | La parte stazionaria che produce il campo magnetico è composta da fogli di acciaio laminati con avvolgimenti di filo isolato. |
| Rotore | La parte rotante che fa girare il carico meccanico può essere di tipo a gabbia di scoiattolo o avvolto. |
| Albero | Trasferisce l'energia meccanica dal motore al carico azionato; fuoriesce dall'alloggiamento del motore. |
| Cuscinetti | Supportano il rotore e gli consentono di ruotare agevolmente all'interno dello statore; possono essere cuscinetti a sfera o a rulli. |
| Campane finali | I coperchi su ciascuna estremità del motore ospitano i cuscinetti e forniscono un supporto strutturale; sono in ghisa o in alluminio. |
| Ventilatore | Raffredda il motore forzando l'aria sulla sua superficie per dissipare il calore, spesso montato sull'albero del rotore. |
| Involucro | Proteggono i componenti interni da contaminanti esterni e danni fisici e variano da telai aperti a strutture completamente chiuse. |
Tipi di motori CA e loro funzioni
Motori sincroni
I motori sincroni mantengono una velocità costante, proporzionale alla frequenza della tensione di alimentazione CA. Sono adatti quando la regolazione precisa della velocità è fondamentale. Questa caratteristica garantisce la stabilità della velocità del motore, che può variare a seconda del carico ricevuto. È essenziale, soprattutto nei sistemi che richiedono il controllo e la sincronizzazione del tocco.
Pertanto, i motori sincroni sono utili nelle applicazioni industriali di grandi dimensioni in cui è necessario un funzionamento costante, nonché nelle applicazioni di correzione del fattore di potenza e di sincronizzazione dei generatori.
Questi motori sono unici perché possono funzionare a una velocità sincrona pari alla frequenza di alimentazione. Tuttavia, i motori sincroni richiedono un'eccitazione esterna al rotore per generare il campo magnetico, il che li differenzia da altri tipi di motori. Questa eccitazione esterna è necessaria per produrre il campo magnetico e mantenere il funzionamento sincrono.

Motori asincroni (a induzione)
I motori asincroni funzionano secondo il principio dell'induzione elettromagnetica. In un motore a induzione, il rotore ruota con una velocità angolare leggermente inferiore alla velocità sincrona. Lo scorrimento è la differenza tra la velocità del rotore e la velocità sincrona. Questo scorrimento è essenziale per creare una corrente nel rotore e, di conseguenza, la coppia.
I motori a induzione monofase sono comunemente utilizzati negli elettrodomestici e nelle piccole macchine per la loro semplicità, affidabilità ed economicità. Questi motori entrano tipicamente in funzione con l'aiuto di altri dispositivi di avviamento come la fase split, l'avviamento a condensatore o il polo ombreggiato per avviare la rotazione dall'alimentazione monofase. Sono utili per ventilatori, pompe e altri elettrodomestici come i frigoriferi. Sono facili da costruire e relativamente economici, il che li rende adatti all'uso generale.

I motori a induzione trifase, invece, trovano applicazione negli utensili elettrici, nei macchinari e in altre applicazioni industriali che richiedono maggiore energia e prestazioni. Questi motori sono caratterizzati da un design meccanico migliorato per garantire un'elevata affidabilità e un funzionamento costante. Ciò li rende utilizzabili in nastri trasportatori, pompe e compressori industriali, ventilatori e soffianti, ecc.
Sono migliori per la loro superiorità rispetto ai motori monofase in termini di potenza e fattore di potenza e sono autoavvianti. Tuttavia, richiedono il collegamento a una fonte di alimentazione trifase, essenziale per il corretto ed efficiente funzionamento dei motori.
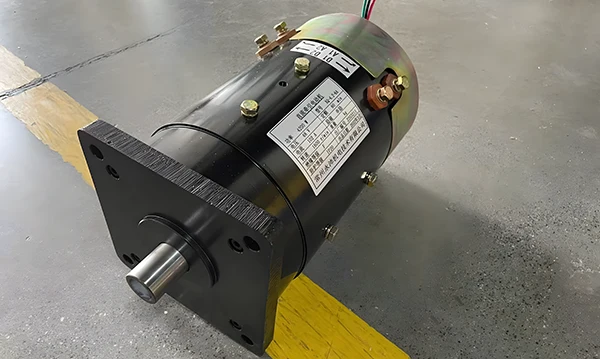
Panoramica dei motori CC
I motori a corrente continua funzionano utilizzando la corrente continua (DC) come fonte di alimentazione. Sono ampiamente applicabili in varie applicazioni grazie alla loro semplicità, al controllo e all'efficienza.
Parti critiche dei motori CC
| Parte | Funzione |
|---|---|
| Statore | La parte stazionaria del motore fornisce il campo magnetico. Di solito contiene avvolgimenti di campo o magneti permanenti. |
| Rotore | La parte rotante del motore si trova sull'albero di uscita. Su di essa si trovano gli avvolgimenti che interagiscono con il campo magnetico per creare il movimento. |
| Commutatore | Il commutatore è un interruttore rotante che altera la direzione della corrente negli avvolgimenti del rotore. Di conseguenza, il motore è in grado di mantenere una rotazione continua. Comprende anelli spaccati che mantengono il contatto elettrico con il rotore tramite spazzole. |
| Spazzole | Materiali conduttivi (in genere a base di carbonio o grafite) che forniscono il contatto elettrico tra le parti stazionarie e rotanti del motore. Premono contro il commutatore per fornire corrente agli avvolgimenti del rotore. |
| Campane finali | Coperchi che proteggono le estremità del motore e ospitano i cuscinetti e le spazzole. Inoltre, sostengono il gruppo rotore e commutatore. |
| Cuscinetti | I cuscinetti sostengono il rotore, consentendogli di ruotare agevolmente all'interno dell'alloggiamento del motore. |
| Avvolgimenti di campo (per motori a campo avvolto) | Quando la corrente li attraversa, le bobine di filo sullo statore generano il campo magnetico. I magneti permanenti sostituiscono i motori a corrente continua a magneti permanenti. |
Tipi di motori CC
Motori CC spazzolati
I motori CC a spazzole sono presenti in due forme. I motori CC avvolti in serie sono quelli in cui le connessioni dell'indotto e degli avvolgimenti di campo sono collegate in serie e presentano quindi un'elevata coppia di avviamento. Questi motori sono adatti a industrie e aziende che richiedono una velocità variabile e un carico di coppia elevato.
I motori CC con avvolgimento shunt sono motori CC a spazzole con avvolgimenti di campo paralleli all'armatura. Questa disposizione fa sì che il carico non influisca sulla velocità del motore. Questa caratteristica li rende adatti alle applicazioni in cui è auspicabile un controllo accurato della velocità.
I motori CC a bobina composta hanno avvolgimenti sia in serie che in derivazione. Questi motori sono una combinazione di coppia di avviamento elevata e velocità del motore stabile. Per questo motivo, i motori a bobina composta sono utili e adatti in caso di carichi variabili.
Motori CC senza spazzole (BLDC)
I motori BLDC possono essere classificati in due tipi, a seconda della posizione del rotore rispetto allo statore. Nel tipo a rotore esterno, il rotore circonda gli avvolgimenti dello statore, fornendo una maggiore inerzia rotazionale e rendendolo ideale per le applicazioni che richiedono un movimento regolare e stabile. Questa configurazione è utile in molti apparecchi e macchine, soprattutto quando sono necessarie alta efficienza e affidabilità, come i dischi rigidi dei computer e le ventole di raffreddamento.
Il tipo a rotore interno, invece, è una macchina elettrica in cui il rotore si trova negli avvolgimenti dello statore. Questo design è molto vantaggioso per le applicazioni che richiedono un fattore di forma miniaturizzato e un'alta densità di potenza ed è quindi applicabile alla robotica e al settore aerospaziale. Pertanto, entrambi i tipi di motori BLDC presentano maggiori vantaggi in termini di prestazioni ed efficienza rispetto alle loro diverse applicazioni.
Metriche di efficienza e prestazioni: Motori a corrente alternata vs. motori a corrente continua
Efficienza energetica
Alcuni parametri che influenzano l'efficienza dei motori CA e CC sono il fattore di potenza e lo scorrimento. Per i motori a induzione, il rendimento η è:
η=Pfuori/Pin ×100
Dove Pfuori =potenza di uscita e Pin =potenza in ingresso. La potenza in ingresso è costituita dalla potenza elettrica in ingresso al motore e dalle perdite, tra cui la perdita del nucleo, la perdita di rame e la perdita meccanica, come la perdita per attrito. Un altro fattore che influisce sull'efficienza dei motori sincroni è il fattore di potenza, il cui valore deve essere pari all'unità per ottenere la massima efficienza.
Controllo della velocità
Il controllo della velocità nei motori a corrente alternata dipende dalla variazione della frequenza di alimentazione (nei motori sincroni) o dall'uso di azionamenti a frequenza variabile (VFD). La velocità 𝑁 di un motore a induzione si calcola con la formula:
N=120f/P
dove 𝑓 rappresenta la frequenza di alimentazione in Hertz e P è il numero di poli.
Il controllo della velocità nei motori a corrente continua è relativamente semplice e dipende dalla variazione della tensione di armatura. V. La velocità N di un motore CC può essere determinato dall'equazione:
N=(V-IaRa)/(keφ)
V è la tensione applicata, Iaè la corrente di armatura, Raè la resistenza di armatura, (ke) è la costante della forza elettromotrice (EMF) posteriore e Φ è il flusso per polo.
Generazione di coppia
La coppia in un motore a corrente alternata, in particolare nei motori a induzione, è data da:
T=Pfuori/w
Dove T e ω sono le velocità angolari in radianti al secondo.
La coppia T in un motore DC è dato da:
T=ktIaφ
kt è la costante di coppia, φ è il flusso e Ia è la corrente di armatura. I motori a corrente continua forniscono un'elevata coppia di avviamento e possono essere controllati facilmente per applicazioni a velocità e coppia variabili.
Capacità di gestione del carico
I motori a corrente alternata, in particolare quelli a induzione, sono adatti a condizioni di carico variabili e sono fondamentali per il servizio continuo. Le loro prestazioni sono soggette a variazioni di carico: l'efficienza è solitamente inferiore in condizioni di carico leggero e di carico elevato. Il fattore di carico è fondamentale anche per il risultato operativo a lungo termine e l'utilizzo delle risorse.
I motori a corrente continua sono adatti per applicazioni in cui un sistema si avvia, si arresta o inverte frequentemente la direzione. La capacità di gestione del carico è la quantità di coppia a bassi livelli di giri al minuto. Le prestazioni di un motore a corrente continua sotto carico possono aumentare con circuiti di controllo elettronici che controllano la tensione e la corrente.
Vantaggi e svantaggi dei motori CA
| Aspetto | Vantaggio | Svantaggio |
|---|---|---|
| Costo | In genere, il costo iniziale è inferiore a quello dei motori a corrente continua, grazie alla struttura più semplice e al minor numero di componenti. | La necessità di apparecchiature aggiuntive, come gli azionamenti a frequenza variabile (VFD) per il controllo della velocità, può comportare costi di installazione e di esercizio più elevati. |
| Efficienza | Elevata efficienza nella conversione dell'energia elettrica in energia meccanica, soprattutto nelle applicazioni su larga scala. | L'efficienza può essere influenzata da problemi di fattore di potenza; il mantenimento di un fattore di potenza elevato può richiedere componenti aggiuntivi. |
| Manutenzione | L'assenza di spazzole e commutatori riduce al minimo i requisiti di manutenzione. | Un raffreddamento e una ventilazione efficaci sono fondamentali per evitare il surriscaldamento, mentre la manutenzione ordinaria dei cuscinetti e dell'isolamento può essere necessaria. |
| Controllo della velocità | Il controllo della velocità prevede l'uso di VFD, che consentono una regolazione precisa e flessibile della velocità. | La complessità e il costo dei VFD possono rappresentare uno svantaggio per le applicazioni che richiedono soluzioni semplici o a basso costo. |
| Durata | Design robusto e durevole, in particolare nelle applicazioni industriali con elevati requisiti operativi. | La sensibilità alle condizioni ambientali, come l'umidità e la polvere, può influire sulle prestazioni e sulla durata. |
| Stabilità operativa | Garantisce un funzionamento stabile e continuo con prestazioni costanti in condizioni di carico variabili. | Possono subire perdite di efficienza a carichi bassi o elevati, con un impatto sulle prestazioni complessive in applicazioni specifiche. |
| Potenza Facto | I motori CA possono avere un buon fattore di potenza con una progettazione e un controllo adeguati, migliorando l'efficienza complessiva del sistema. | La correzione del fattore di potenza può essere necessaria per ottimizzare l'efficienza e ridurre le perdite di potenza reattiva, con conseguenti costi aggiuntivi. |
| Dimensioni e peso | Generalmente più leggeri e compatti dei motori CC equivalenti a parità di potenza. | In alcuni casi, i motori in c.a. possono richiedere componenti aggiuntivi per ottenere prestazioni ottimali, aumentando le dimensioni e il peso complessivi. |
| Applicazioni | Versatile e ampiamente utilizzato in diverse applicazioni, tra cui sistemi HVAC, macchinari industriali ed elettrodomestici. | È adatto solo per le applicazioni che richiedono un'elevata coppia di spunto o un controllo preciso della velocità con un'apparecchiatura aggiuntiva. |
Vantaggi e svantaggi dei motori CC
| Aspetto | Vantaggio | Svantaggio |
|---|---|---|
| Costo | In genere, i motori e le applicazioni più piccoli costano meno grazie a sistemi di controllo più semplici. | I costi iniziali più elevati per i motori più grandi e la necessità di componenti aggiuntivi come commutatori e spazzole possono aumentare i costi di manutenzione. |
| Efficienza | Generalmente ad alta efficienza con un controllo preciso della velocità e della coppia. | L'efficienza riduce le perdite dovute a spazzole e commutatori e, in alcuni casi, aumenta il consumo energetico. |
| Manutenzione | Grazie alla semplicità del design e dei sistemi di controllo, sono facili da mantenere e riparare. | Le spazzole e i commutatori si usurano con il tempo e richiedono una manutenzione e una sostituzione regolari. |
| Controllo della velocità | Offre una regolazione accurata della velocità e una regolazione flessibile della coppia, rendendola perfetta per le applicazioni che richiedono modifiche precise. | I sistemi di controllo della velocità possono essere più complessi e costosi dei motori a corrente alternata, in particolare nelle applicazioni di alta potenza. |
| Durata | Robusto e affidabile, soprattutto nelle applicazioni che richiedono un controllo preciso e un'elevata coppia di spunto. | Dipende dall'usura delle spazzole e dei commutatori, che influisce sulla durata e sulle prestazioni nel tempo. |
| Stabilità operativa | Grazie alle superiori capacità di controllo, alle eccellenti prestazioni in condizioni di carico variabile e ai frequenti avviamenti/arresti. | Se non vengono mantenuti correttamente, le prestazioni possono risultare meno stabili in presenza di temperature estreme o elevate. |
| Potenza Facto | In genere il fattore di potenza è buono in molte applicazioni, ma è meno preoccupante rispetto ai motori CA. | I problemi di fattore di potenza sono generalmente meno pronunciati, ma possono influire sull'efficienza in configurazioni specifiche. |
| Dimensioni e peso | Sono compatti e leggeri per la loro potenza, il che li rende adatti ad applicazioni con limiti di spazio. | I motori in c.c. più grandi possono richiedere spazio aggiuntivo per i gruppi spazzola e commutatore, con un potenziale impatto sulle dimensioni e sul peso complessivi. |
| Applicazioni | È ideale per le applicazioni che richiedono una coppia di spunto elevata, un controllo preciso e frequenti inversioni di marcia, come la robotica e i sistemi automobilistici. | A causa dei limiti di dissipazione del calore e dell'usura delle spazzole, i motori a corrente continua sono meno adatti alle applicazioni di alta potenza e a funzionamento continuo rispetto ai motori a corrente alternata. |
Porta a casa
La decisione di utilizzare motori CA o CC è quindi più guidata dalla natura dell'applicazione. I motori a corrente alternata sono migliori per la loro robustezza, il risparmio energetico e l'economicità, soprattutto nelle istituzioni commerciali. Queste e altre caratteristiche possono essere essenziali in varie applicazioni che richiedono poca manutenzione e un design semplice, dall'uso domestico a quello industriale.
D'altra parte, i motori a corrente continua sono ideali per l'uso in cui sono necessarie velocità variabili, coppia di avviamento elevata e inversione di marcia. Una delle sue applicazioni specifiche è la flessibilità e la facilità di controllo, una caratteristica eccellente per i sistemi automobilistici, la robotica e numerosi microdispositivi.
D'altra parte, i maggiori requisiti di manutenzione e le perdite di efficienza associate a spazzole e commutatori possono essere svantaggiosi in applicazioni specifiche. In conclusione, la conoscenza e l'analisi dei punti di forza e di debolezza di ciascun tipo di motore consente di prendere una decisione basata sulle aspettative di prestazione, sui costi e sugli aspetti operativi. La comprensione di ciò che è necessario in una particolare applicazione è essenziale nelle applicazioni dei motori.